

The Story Behind
The idea for the project was born sometime in 2017 when entrepreneur Jonas Blanck read about an engineer in california who had built a small, solar powered autonomous boat in his garage and sailed it to hawaii.
SeaCharger as the boat was called could be followed live via Internet and based on off-the-shelf electronics as much as possible. After reading about the challenges that Damon had in his detailed build blog the research and planning for a similar project got started.
During a few weeks, the first SunChallenger prototype was built and launched with simple and inexpensive boat parts. A lot of the time was spent programming and calibrating the internet-connected autopilot that would control the boat day and night.
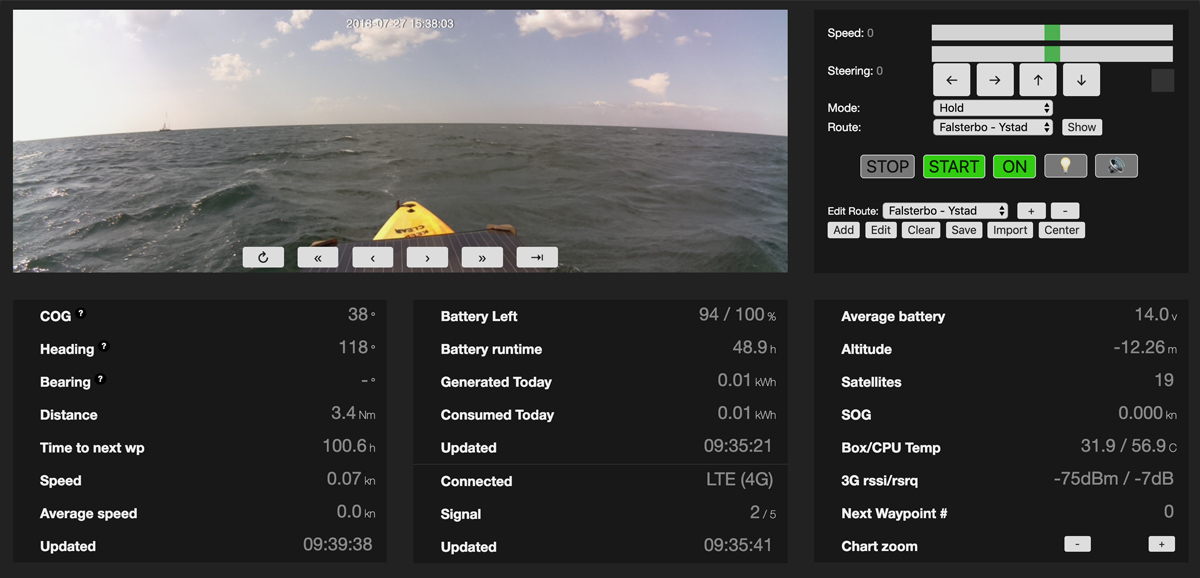
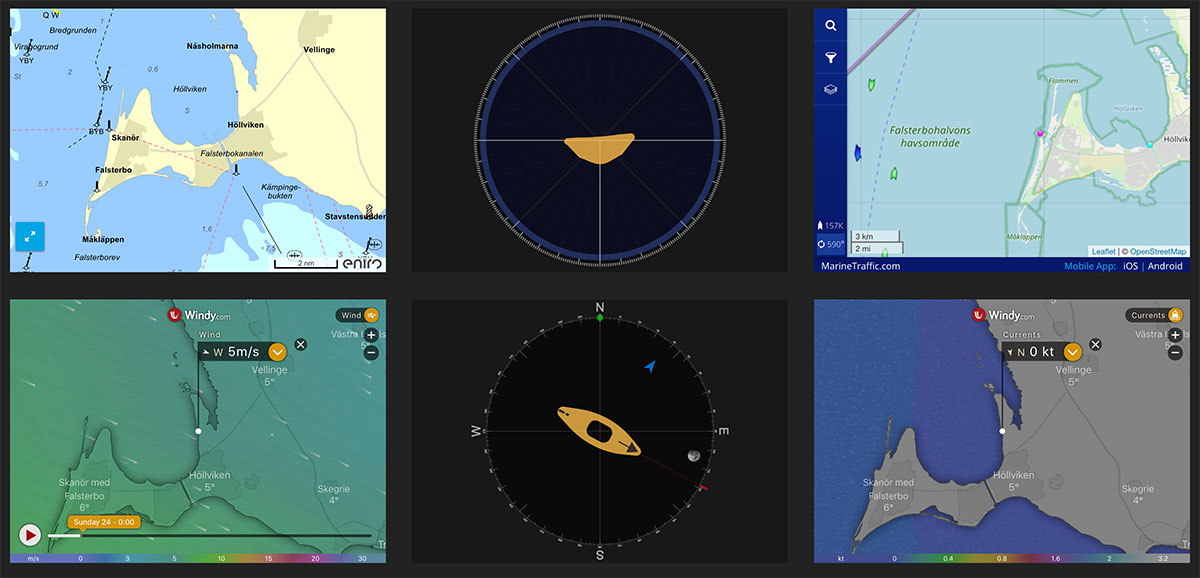
The initial goal was to sail 470 Nm from southern Sweden to Stockholm based on a pre-programmed route under constant surveillance via an interface with available image and navigation data. After 7 days of traveling at sea, the decision was taken to return the boat because several components began to wear out and the lack of redundancy.
The work on SunChallenger II began early 2019 with an upgraded, two-hull catamaran with full redundancy using dual engines, a large solar panel array, extended battery capacity and a real-time object avoidance system. The purpose of the project was also expanded to collect advanced measurement data for water and air quality along the Swedish coastline.